

{kind=link}
{kind=link}
{kind=link}
机器人三维靶向定位系统在CT引导下肺穿刺活检术中的应用
[陈晓霞1 , 刘昊1 , 赵国全1 , 王倜1 , 侯文文1 , 王贵生1  , 王楚涵
, 王楚涵2 ]
, 王楚涵|
|


目的 探讨MAXIOTM机器人三维靶向定位系统在CT引导下肺穿刺活检术中的应用。方法 选择2017-08至09 40例经评估适合行肺穿刺活检术患者,随机分为试验组和对照组,每组20 例。试验组采用MAXIOTM机器人三维靶向定位系统在CT引导下行肺穿刺活检术,对照组采用传统格栅定位器行CT引导下穿刺活检。比较试验组与对照组平均操作时间、一次性穿刺成功率、扫描次数、并发症发生率、活检病理诊断阳性率。结果 试验组和对照组肺穿刺平均操作时间分别为(24.0±3.9)min和(27.3±4.1)min,两组比较差异无统计学意义( t=-1.91, P>0.05);试验组和对照组一次性穿刺成功率分别为75%(15/20)和25%(5/20),两组比较差异有统计学意义( χ2=8.10, P<0.05);试验组和对照组平均扫描次数分别为(4.1±0.5)次和(6.0±1.3)次,两组比较差异有统计学意义( t=-4.65, P<0.05);试验组和对照组并发症发生率分别为10%(2/20)和40%(8/20),两组比较差异有统计学意义( χ2=4.68, P<0.05);试验组和对照组活检病理诊断阳性率分别为100%(20/20)和90%(18/20),两组比较差异无统计学意义( χ2=2.05, P>0.05)。结论 MAXIOTM机器人三维靶向定位系统在CT引导下肺穿刺活检术前较为精确地规划了穿刺路径,机械臂实时立体引导操作,一次性穿刺成功率提高,扫描次数减少,辐射剂量降低,并发症发生率低,具有较高的临床应用价值。
Objective To explore the clinical value of MAXIOTM robotic three-dimensional targeting system in lung puncture biopsy guided by CT.Methods Between August and September 2017, 40 patients were randomly divided into the experimental group and control group. The experimental group adopted the MAXIOTM robotic three-dimensional targeting positioning system in the CT guided descending pulmonary puncture biopsy, while the control group was guided by the traditional grid locator to conduct the puncture biopsy. The average length of operation, one-time puncture success rate, scanning frequency, complication rate and biopsy pathological diagnosis rate were compared between the two groups.Results The average length of operation of lung puncture in the experimental group and control group was (24.0±3.9) min and (27.3±4.1) min respectively, so the difference between the two groups was not statistically significant( t=-1.91, P>0.05). The one-time puncture success rate of the experimental group and control group was 75% (15/20) and 25% (5/20)respectively, suggesting that the difference between the two groups was statistically significant( χ2=8.10, P<0.05). The average scanning times of the experimental group and the control group were (4.1±0.5)times and (6.0±1.3)times respectively, and the difference between the two groups was statistically significant( t=-4.65, P<0.05). The incidence of complications was 10% (2/20) and 40% (8/20) respectively in the experimental group and the control group so that the difference between the two groups was statistically significant( χ2=4.68, P<0.05). The positive rate of test in the experimental group and the control group was 100% (20/20) and 90% (18/20) respectively, so the difference between the two groups was not statistically significant ( χ2=2.05, P>0.05).Conclusions The MAXIOTM robotic 3D targeting system can accurately plan the puncture path before CT-guided lung biopsy. The real-time stereotactic operation of the robot arm can improve the success rate of disposable puncture, thus reducing the times of scans, radiation dose and complications.
CT引导下经皮肺穿刺活检术于1976年由Haaga和 Alfidi [1]首先报道, 现已成为肺部病变定性诊断和鉴别诊断的主要方法和重要手段之一[2]。目前, 国内多数医院采用传统横断面图像下利用体表栅格定位器技术进行CT引导下肺穿刺活检术, 具有诸多不足之处, 如路径选择单一、穿刺针无角度指示等, 需行多次验证扫描致辐射剂量增加、小病灶或复杂部位病灶穿刺易失败等。虽然已有多种导引CT引导下穿刺的新方法, 如实时CT透视、激光定位、电磁导航等[3, 4, 5, 6], 但均有局限性, 并未广泛应用于临床。MAXIOTM机器人三维靶向定位系统(下文简称“ MAXIOTM系统” )是一个经皮穿刺微创介入手术的立体定向治疗计划及进针协助系统, 可在重建的3D图像模型和多平面视图(冠状位、矢状位、轴位)上可视化显示一个或者多个探针的计划路径和定位, 其搭载的立体定位机械臂能够协助医师将一个或者多个手术工具精准地穿刺到靶点部位。本研究旨在探讨MAXIOTM系统在CT引导下肺穿刺活检术中的应用。
选取2017年8-9月我科行CT引导下肺穿刺活检术病例40例, 男18例, 女22例; 年龄3967岁, 平均(55.7± 8.2)岁; 病灶大小(0.9 cm× 1.1 cm× 1.3 cm)(6.5 cm× 6.1 cm× 5.5 cm)。随机分为试验组与对照组, 各20例。试验组采用MAXIOTM系统辅助行CT引导下肺穿刺活检术, 对照组采用传统体表格栅定位器行CT引导下肺穿刺活检术。所有病例术前均经影像学检查证实, 均有增强检查资料, 术前血常规、出凝血时间、凝血酶原时间均在正常范围内, 无CT引导下肺穿刺活检术禁忌证存在。研究通过医院伦理委员会审查, 患者均签署知情同意书。
1.2.1 主要设备及器材 GE Discovery CT 750HD 扫描仪(GE Healthcare), 穿刺活检同轴引导活检针(美国ARGIO Co-Axial Introducer Needle 17G), 一次性使用活检针(美国ARGON Full Core Biopsy Instrument 18G), 栅格定位器。
1.2.2 MAXIOTM系统 MAXIOTM系统由印度Perfint Heathcare公司研制, 是一个经皮穿刺微创介入手术的立体定向治疗计划及进针协助系统, 系统组成包括一个立体定向穿刺引导设备及一个图像处理及治疗计划工作站(图1)。
 | 图1 MAXIOTM系统组成 |
1.2.3 MAXIOTM系统辅助CT引导下肺穿刺活检术操作过程
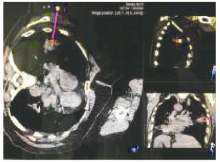
1.2.3.1 穿刺前准备 将MAXIOTM系统固定于地面连接结构, 通过系统配备InstaRegTM对接板将MAXIOTM系统与CT检查床对接。根据患者病灶部位, 选取恰当体位, 将患者固定于专用真空固定床, 并训练患者摒气。CT扫描完成后, 将原始图像传输至MAXIOTM系统工作站, 在2D多平面视图和3D图像上, 选取最佳穿刺层面, 进行进针轨迹设计。确定皮肤穿刺点和病灶到达靶点, 可同时在三维平面上设计调整进针路径, 确保进针路径最优化(图2); 确定穿刺路径后, 系统将生成VR图像, 模拟活检针进针后效果, 显示更加直观(图3)。之后将同轴引导活检针实际长度输入系统, 完成设计后确定穿刺方案, 按照屏幕显示的穿刺靶层数字, 将扫描床移动至该数字位置。
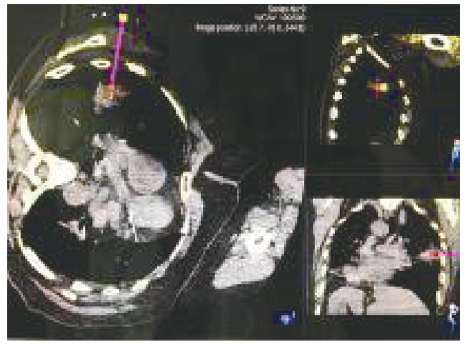 | 图2 MAXIOTM系统立体定向穿刺三维平面 |
 | 图3 MAXIOTM系统立体定向穿刺VR图像及模拟效果 |
1.2.3.2 穿刺过程 验证患者位置及呼吸幅度水平后, 按下Position键, 定位机械臂将自动到达设定位置, 放下激光指示, 十字激光束投照点即为穿刺进针点。常规消毒皮肤及机械臂夹针器, 铺巾, 将一次性使用无菌导针器与夹针器牢固对接。2%利多卡因麻醉行局部浸润麻醉(勿穿破胸膜), 麻醉满意后, 将同轴引导活检针放置于导针器内, 快速推送活检针直至针柄紧贴导针器。为验证同轴引导活检针是否位于病灶靶点, 此时松开夹针装置, 进行验证扫描。确认同轴引导活检针位置后, 使用切割活检针进行取材, 取材前选择好合适的击发长度(1.33.3 cm), 此时嘱患者屏气, 保持针鞘固定, 拔出针芯约0.5 cm, 在针芯和针鞘末端间隙注入少量液体水封以阻止气体进出, 操作者一手拔出针芯时, 另一手指迅速封堵针鞘, 拿好活检枪后, 迅速插入针鞘内, 进行取材, 拔出活检针时, 手指迅速封堵针鞘, 并迅速替换入针芯, 选取不同方向取材23次, 使用少量水封及封堵针鞘目的是降低气胸的发生率[7]。取材完毕后, 进行胸部扫描, 观察有无肺部出血、气胸等并发症的发生。
1.2.4 传统格栅定位器CT引导下穿刺活检操作过程 根据术前影像资料选择合适体位, 于体表相应位置放置栅格定位器, 进行CT扫描。扫描后对图像进行二维及三维图像重建分析, 规避肋骨、肩胛骨、大血管、叶间胸膜、肺大泡区域及病灶坏死区[8], 尽量以病灶与胸壁的最短距离为穿刺点, 测定病灶靶点距皮肤的距离及进针角度, 确定最佳穿刺点及路径。根据确定层面标示数值将扫描床移动至相应位置, 结合格栅定位器与扫描仪定位线在体表穿刺点做标记。常规消毒铺巾, 2%利多卡因麻醉行局部浸润麻醉(勿穿破胸膜), 麻醉满意后, 按照预先设定的进针角度及长度进行穿刺, 当活检针进针至胸壁后, 嘱患者屏住呼吸, 快速进针至预定深度, 再让患者缓慢均匀呼吸。再次对此部位进行扫描, 以确定穿刺针是否到达病灶靶点, 如果穿刺位置准确, 即可进行取材, 如果位置偏差, 调整穿刺针后, 重复扫描, 直至穿刺针尖到达病灶靶点。使用切割活检针进行取材, 取材前选择合适的击发长度(1.33.3 cm), 取材过程中使用少量水封及封堵针鞘, 选取不同方向取材23次。取材完毕后, 进行胸部扫描, 观察有无肺部出血、气胸等并发症的发生。
1.2.5 数据收集 记录如下数据:(1)穿刺操作时间, 患者自上CT床开始至最后一次CT扫描结束; (2)一次性穿刺成功率; (3)扫描次数; (4)并发症发生情况; (5)活检病理诊断阳性情况。
采用统计学软件SPSS 20.0对资料进行分析。使用成组t检验比较试验组与对照组平均操作时间、扫描次数间的差异; 使用χ 2检验比较试验组与对照组一次性穿刺成功率、并发症发生率、活检病理诊断阳性率间的差异。以P< 0.05为差异有统计学意义。
试验组均获取足够组织并明确了病理诊断, 阳性率100%; 对照组19例获取足够组织并明确了病理诊断, 阳性率95%, 1例活检样本取材不够, 进行了第2次穿刺。两组活检病理诊断阳性率比较, 差异无统计学意义(χ 2=2.05, P> 0.05)
试验组2例(10%)发生少量气胸, 均经平卧吸氧后自行缓解; 对照组7例(35%)发生少量气胸, 经平卧吸氧后自行缓解, 1例(5%)肺内穿刺部位发生少量肺出血, 经引导活检针局部注射凝血酶后治愈。两组并发症发生率比较, 差异有统计学意义(χ 2=4.68, P< 0.05)。
试验组肺穿刺平均操作时间(24.0± 3.9)min, 对照组为(27.3± 4.1)min, 两组比较差异无统计学意义(t=-1.91, P> 0.05); 一次性穿刺成功率试验组75%(15/20), 对照组25%(5/20), 两组比较差异有统计学意义(χ 2=8.10, P< 0.05); 试验组平均扫描次数(4.1± 0.5)次, 对照组为(6.0± 1.3)次, 两组比较差异有统计学意义(t=-4.65, P< 0.05)。
CT引导下经皮穿刺活检是肺部多种疾病诊断的金标准模式[9], 且具有较低的并发症发生率, 已被公认为诊断肺部疾病的安全手段[10]。目前国内多数医院采用传统横断面手动穿刺方式, 利用栅格定位器和CT激光定位线在患者体表的投影标记进针点, 无导引设备, 进行徒手操作, 使用的穿刺针无角度指示, 只能依靠术者经验手动调整进针角度, 存在一定的盲目性, 有时需要多次调整穿刺方向, 多次穿破胸膜, 不断通过重复扫描验证穿刺针位置, 穿刺风险大大增加[11]。
在本研究中, 与试验组相比, 对照组一次性穿刺成功率较低, 并发症发生率较高, 患者辐射损伤增加。且既往研究表明, 病灶位置越深、病灶体积越小穿刺成功率及活检病例诊断阳性率越低[12]。CT透视导引技术可在穿刺过程中持续透视、实时三维导引, 使穿刺更为准确, 但其辐射剂量明显高于常规CT, 对患者和操作者均增加辐射伤害。C形臂CT引导下穿刺活检利用了锥形束CT的灵活性, 但其辐射暴露剂量与CT透视方式相当, 临近应用亦受限[13, 14]。
MAXIOTM机器人三维靶向定位系统利用DICOM传输的CT图像数据进行三维重建, 可以完成病灶勾画, 血管及危险区域标注, 还可以同时在三维平面上设计调整进针路径, 确保进针路径最优化; 确定穿刺路径后, 系统将生成VR图像, 模拟活检针进针后效果, 显示更加直观, 实现CT引导下穿刺术的真正三维靶向定位。MAXIOTM系统配备的机械臂可自动移动至计划设定的位置, 持针器伸展, 操作者只需通过持针器直接推送穿刺针, 即完成穿刺操作, 降低了操作者人为因素对于肺穿刺活检术的影响。
本研究中, 试验组MAXIOTM系统在穿刺路径设计确认后, 包含进针角度数值的指令传送至MAXIOTM系统搭载的立体定位机械臂, 该机械臂具有5个自由度(3个线性轴和2个角度轴), 能够根据设计指令, 在任意复杂和复合角度下完成定位, 操作者只需按照持针器指示直接完成穿刺, 无需自行调整进针角度及测量长度, 一次性穿刺成功率较对照组明显提高。患者上扫描床后, MAXIOTM系统需将CT扫描数据上传、重建后进行穿刺路径规划设计, 并需输入其他所需参数, 此过程用时在穿刺所需时间中所占比例较大, 试验组与对照组在平均操作时间上无统计学差异。扫描次数方面, 理论上MAXIOTM系统辅助CT引导下肺穿刺活检术所需最低扫描次数为2次, 即:初次扫描以进行穿刺路径规划设计, 第二次扫描观察有无并发症发生, 在本研究中, 为确保穿刺无误, 在取材时还需进行1次扫描, 验证穿刺针位置; 对于传统穿刺方式, 一般至少需要进行4次扫描才能完成。本研究试验组实际扫描次数显著低于对照组实际扫描次数, 因扫描次数减少, 试验组患者所受辐射剂量较对照组患者所受辐射剂量低, 减少了对患者的辐射伤害。
MAXIOTM系统辅助CT引导下肺穿刺活检术的操作体会:(1)穿刺全程需保证患者身体无移动, 使用配备的真空抽吸床垫将患者固定, 效果较为理想; (2)系统需要输入的引导活检针实际长度, 并非是产品使用说明上的所示长度, 而是引导活检针的实际测量长度:如美国ARGIO Co-Axial Introducer Needle(17G)产品标签所示长度为11.8 cm, 但实际测量针尖至针尾长度为12.1 cm; (3)机械臂到达相应位置后, 由激光十字光束投射到患者体表指示穿刺点, 但受患者的呼吸影响, 穿刺点会有轻度移位, 若使用MAXIOTM系统配备的交互式呼吸监控系统, 获取患者呼吸相关数据, 可使激光光束实时投射在患者计划穿刺位置, 不受呼吸影响, 使穿刺位置更加精确; (4)导针器的孔道与实际穿刺针的直径并不完全匹配, 经常出现过松(穿刺针通过后仍可晃动)或过紧(穿刺针无法通过)的现象, 可以另取一个导针器, 将这两个导针器各取一半进行拼接使用, 一般情况下均能与穿刺针较好匹配。
综上所述, MAXIOTM机器人三维靶向定位系统在CT 引导下肺穿刺活检术前较为精确的规划了穿刺路径, 立体定位机械臂实时立体引导操作, 一次性穿刺成功率提高, 扫描次数减少, 辐射剂量降低, 并发症发生率低, 活检病理诊断阳性率较高, MAXIOTM机器人三维靶向定位系统辅助CT引导下肺穿刺活检术安全、有效, 具有较高的临床应用价值。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|